Embedded Linux od podstaw — szybko i łatwo z QEMU
Skompiluj system Linux i jego narzędzia budowania od zera
W tym artykule stworzymy od zera system embedded Linux, wyemulujemy płytkę opartą na ARM i uruchomimy na niej nasz system.
Czego potrzebujemy?
Żeby pomyślnie uruchomić embedded Linux na wybranej platformie, potrzebujemy pięciu głównych elementów:
- Toolchain
- Bootloader
- Kernel
- Główny system plików
- Przydatna aplikacja 😉
Skoro będziemy emulować płytkę w QEMU, możemy pominąć bootloader.
Proste 😃. Przejdźmy do toolchaina.
Czym jest toolchain i po co nam?
Toolchain pozwala kompilować kod źródłowy do plików wykonywalnych. Składa się z kilku narzędzi: linkera, asemblera, kompilatora i bibliotek. Więcej szczegółów znajdziesz tutaj. Gdy plik wykonywalny uruchamiamy na tym samym typie systemu co host, mamy do czynienia z natywnym toolchainem. Nasz procesor płytki to ARM, a host działa na x86_64. Musimy więc wykonać cross-kompilację kodu źródłowego - do tego potrzebujemy cross-toolchaina.
Okej, świetnie. Ale jak go zdobyć?
Mamy dwie opcje. Pierwsza - ściągnij gotowy, na przykład:
Krótko mówiąc: poszukaj i pobierz 😃.
Druga opcja - zbuduj własny. Użyjemy crosstool-NG. Najpierw musimy zbudować sam crosstool-NG. Wymagania dla różnych dystrybucji znajdziesz tutaj. Używam Ubuntu 22.04 i uruchamiam:
$ sudo apt-get update
$ sudo apt-get install -y gcc g++ gperf bison flex texinfo help2man make libncurses5-dev \
python3-dev autoconf automake libtool libtool-bin gawk wget bzip2 xz-utils unzip \
patch libstdc++6 rsync git meson ninja-build dos2unix
$ git clone https://github.com/crosstool-ng/crosstool-ng.git $ cd crosstool-ng
$ git checkout tags/crosstool-ng-1.25.0 -b ct-ng
$ # Clean files from \r
$ find . -type f -exec dos2unix {} \;
$ ./bootstrap
$ ./configure --prefix=$(pwd)/bin
$ make
$ make install
$ PATH="$PATH:$(pwd)/bin/bin"Super, teraz możemy wywołać narzędzie komendą ct-ng. Zobaczmy dostępne przykłady.
$ ct-ng list-samples
...
Status Sample name
[L...] aarch64-ol7u9-linux-gnu
[L...] aarch64-rpi3-linux-gnu
[L...] aarch64-rpi4-linux-gnu
[L..X] aarch64-unknown-linux-android
[L...] aarch64-unknown-linux-gnu
[L...] aarch64-unknown-linux-uclibc
[L...] alphaev56-unknown-linux-gnu
[L...] alphaev67-unknown-linux-gnu
[L...] arc-arc700-linux-uclibc
[L...] arc-archs-linux-gnu
[L...] arc-multilib-elf32
[L...] arc-multilib-linux-gnu
[L...] arc-multilib-linux-uclibc
[L...] arm-bare_newlib_cortex_m3_nommu-eabi
[L...] arm-cortex_a15-linux-gnueabihf
[L..X] arm-cortexa5-linux-uclibcgnueabihf
[L...] arm-cortex_a8-linux-gnueabi
[L..X] arm-cortexa9_neon-linux-gnueabihf
[L..X] x86_64-w64-mingw32,arm-cortexa9_neon-linux-gnueabihf
[L...] armeb-unknown-eabi
[L...] armeb-unknown-linux-gnueabi
[L...] armeb-unknown-linux-uclibcgnueabi
[L...] arm-multilib-linux-uclibcgnueabi
[L...] arm-nano-eabi
[L...] arm-ol7u9-linux-gnueabi
...Wow! Tego jest sporo. Co to wszystko oznacza?
Konwencja nazewnictwa wygląda tak:
<Architektura CPU>-<Dostawca>-<System Operacyjny>-<ABI / Biblioteki>
Architektura CPU: ARM (arm/aarch64), x86_64, MIPS itd. plus informacja o kolejności bajtów (_eb/_el)
Dostawca: Twórca toolchaina, np. buildroot, minGW. Często nieznany lub pominięty.
System Operacyjny: Specyfikacja API, np. linux, win32.
ABI (Application Binary Interface) / Biblioteki: Przestrzeń użytkownika (gnu, musle) oraz ABI takie jak EABI czy EABIHF (Extended Application Binary Interface Hard-Float).
Wybierzmy arm-unknown-linux-gnueabi z przykładów. Żeby zobaczyć więcej informacji, wywołujemy:
$ ct-ng show-arm-unknown-linux-gnueabi
[L...] arm-unknown-linux-gnueabi
Languages : C,C++
OS : linux-5.16.9
Binutils : binutils-2.38
Compiler : gcc-11.2.0
C library : glibc-2.35
Debug tools : duma-2_5_15 gdb-11.2 ltrace-0.7.3 strace-5.16
Companion libs : expat-2.4.1 gettext-0.21 gmp-6.2.1 isl-0.24 libelf-0.8.13 libiconv-1.16 mpc-1.2.1 mpfr-4.1.0 ncurses-6.2 zlib-1.2.12
Companion tools :Sprawdźmy, czy ten cross-toolchain spełnia nasze wymagania. Moim zdaniem tak 😃. Jeśli chcemy go skonfigurować, możemy użyć arm-unknown-linux-gnueabi jako punktu wyjścia. Do dalszych dostosowań przyda się menuconfig.
$ ct-ng arm-unknown-linux-gnueabi
[L...] arm-unknown-linux-gnueabi
Languages : C,C++
OS : linux-5.16.9
Binutils : binutils-2.38
Compiler : gcc-11.2.0
C library : glibc-2.35
Debug tools : duma-2_5_15 gdb-11.2 ltrace-0.7.3 strace-5.16
Companion libs : expat-2.4.1 gettext-0.21 gmp-6.2.1 isl-0.24 libelf-0.8.13 libiconv-1.16 mpc-1.2.1 mpfr-4.1.0 ncurses-6
Companion tools :
$ ct-ng menuconfig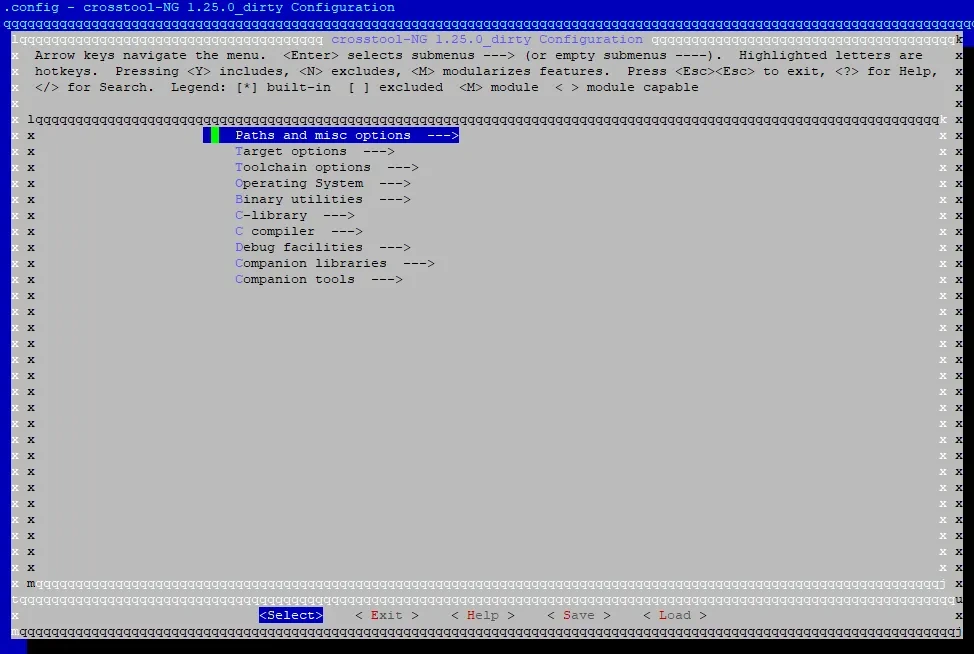
Czas go zbudować.
$ ct-ng build
...
[INFO ] Retrieving needed toolchain components tarballs
[EXTRA] Retrieving 'linux-5.16.9'
[EXTRA] Verifying SHA512 checksum for 'linux-5.16.9.tar.xz'
[EXTRA] Retrieving 'zlib-1.2.12'
[ERROR] zlib: download failed
[ERROR]
...O nie!
Spokojnie. Crosstool-NG nie może pobrać zlib-1.2.12. Archiwa są zapisywane w ~/src. Umieścimy je tam ręcznie.
$ mkdir ~/src && cd ~/src/
$ wget https://zlib.net/fossils/zlib-1.2.12.tar.gz
$ cd -
# I jeszcze raz...
$ ct-ng build
[INFO ] Finalizing the toolchain s directory: done in 2.53s (at 33:03)
[INFO ] Build completed at 20230119.174924
[INFO ] (elapsed: 33:02.82)
[INFO ] Finishing installation (may take a few seconds)...$
$ cd ~
$ PATH="$PATH:$(pwd)/x-tools/arm-unknown-linux-gnueabi/bin"Udało się! Teraz obowiązkowe “hello world”! Zapisz plik helloworld.c z zawartością:
#include <stdio.h>
int main (void)
{
printf ("Hello, world!\n");
return 0;
}Skompiluj go naszym cross-toolchainem:
$ arm-unknown-linux-gnueabi-gcc helloworld.c -o helloworld
$ file helloworld
helloworld: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV),
dynamically linked, interpreter /lib/ld-linux.so.3, for GNU/Linux 5.16.9,
with debug_info, not strippedDziała! Mamy plik wykonywalny dla ARM.
Nasuwa się pytanie. Czemu nie po prostu pobrać gotowego toolchaina? Odpowiedź jest prosta: możesz 😃. O ile znajdziesz taki, który Ci pasuje.
Potrzebuję kernela!
Najpierw pobierz pliki źródłowe kernela.
$ wget https://cdn.kernel.org/pub/linux/kernel/v5.x/linux-5.16.9.tar.xz
$ tar xf linux-5.16.9.tar.xz
$ rm linux-5.16.9.tar.xz
$ cd linux-5.16.9Wersja kernela musi być większa lub równa wersji określonej w toolchainie.
$ ct-ng show-arm-unknown-linux-gnueabi
[L...] arm-unknown-linux-gnueabi
Languages : C,C++
OS : linux-5.16.9
Binutils : binutils-2.38
Compiler : gcc-11.2.0
C library : glibc-2.35
Debug tools : duma-2_5_15 gdb-11.2 ltrace-0.7.3 strace-5.16
Companion libs : expat-2.4.1 gettext-0.21 gmp-6.2.1 isl-0.24 libelf-0.8.13 libiconv-1.16 mpc-1.2.1 mpfr-4.1.0 ncurses-6.2 zlib-1.2.12
Companion tools :Ustaw świeżo zbudowany toolchain i skonfiguruj kernel. W /arch/arm/configs/ znajdziesz gotowe pliki konfiguracyjne. Użyjemy płytek Arm Versatile Express, które są również dostępne w QEMU.
$ export ARCH=arm
$ export CROSS_COMPILE=arm-unknown-linux-gnueabi-
$ make vexpress_defconfig
#
# configuration written to .config
#Teraz skompilujmy…
$ make zImage -j$(nproc)
...
fatal error: mpc.h: No such file or directory
...
...Nie! Spokojnie. Taki błąd oznacza tylko, że musimy zainstalować kilka pakietów. Szybkie wyszukiwanie w Google pomoże. W moim przypadku musiałem zainstalować libmpc-dev i libgmp3-dev.
$ sudo apt install -y libmpc-dev libgmp3-dev
$ make zImage -j$(nproc)
...
CC arch/arm/boot/compressed/fdt_wip.o
CC arch/arm/boot/compressed/fdt.o
CC arch/arm/boot/compressed/fdt_check_mem_start.o
SHIPPED arch/arm/boot/compressed/lib1funcs.S
SHIPPED arch/arm/boot/compressed/ashldi3.S
SHIPPED arch/arm/boot/compressed/bswapsdi2.S
AS arch/arm/boot/compressed/hyp-stub.o
AS arch/arm/boot/compressed/lib1funcs.o
AS arch/arm/boot/compressed/ashldi3.o
AS arch/arm/boot/compressed/bswapsdi2.o
AS arch/arm/boot/compressed/piggy.o
LD arch/arm/boot/compressed/vmlinux
OBJCOPY arch/arm/boot/zImage
Kernel: arch/arm/boot/zImage is ready
$ make modules -j$(nproc)
CALL scripts/atomic/check-atomics.sh
CALL scripts/checksyscalls.sh
LDS scripts/module.lds
MODPOST modules-only.symvers
GEN Module.symvers
$ make dtbs -j$(nproc)
DTC arch/arm/boot/dts/vexpress-v2p-ca5s.dtb
DTC arch/arm/boot/dts/vexpress-v2p-ca9.dtb
DTC arch/arm/boot/dts/vexpress-v2p-ca15-tc1.dtb
DTC arch/arm/boot/dts/vexpress-v2p-ca15_a7.dtbMamy zImage i skompilowany Device Tree w /arch/arm/boot.
Ale płytki nie ma!?
Żeby ułatwić sobie życie, użyjemy emulatora QEMU. Krótko o QEMU:
QEMU to darmowy emulator o otwartym kodzie (Quick EMUlator). Emuluje procesor maszyny przez dynamiczną translację binarną i udostępnia różne modele sprzętowe dla maszyny, pozwalając uruchamiać różne systemy operacyjne gości. Współpracuje z Kernel-based Virtual Machine (KVM), dzięki czemu maszyny wirtualne działają z prędkością zbliżoną do natywnej. QEMU potrafi też emulować procesy na poziomie użytkownika, pozwalając aplikacjom skompilowanym dla jednej architektury działać na innej.
— Źródło:https://en.wikipedia.org/wiki/QEMU
Pobieranie i instalacja QEMU są proste. Zróbmy to!
$ sudo apt install -y pkg-config libglib2.0-dev libpixman-1-dev
$ mkdir tools && cd $_
$ wget https://download.qemu.org/qemu-7.2.0.tar.xz
$ tar xvJf qemu-7.2.0.tar.xz
$ cd qemu-7.2.0
$ ./configure --target-list=arm-softmmu
$ make
$ PATH="$PATH:$(pwd)/build/arm-softmmu"Teraz możemy wywołać QEMU przez qemu-system-arm. Sprawdźmy!
Mówimy QEMU, że nasza płytka to vexpress-a9 z 256 MB RAM, wskazujemy na obraz kernela i skompilowany Device Tree, przekazujemy terminal szeregowy.
$ cd ~/linux-5.16.9
$ qemu-system-arm -M help
...
versatileab ARM Versatile/AB (ARM926EJ-S)
versatilepb ARM Versatile/PB (ARM926EJ-S)
vexpress-a15 ARM Versatile Express for Cortex-A15
vexpress-a9 ARM Versatile Express for Cortex-A9
virt-2.10 QEMU 2.10 ARM Virtual Machine
virt-2.11 QEMU 2.11 ARM Virtual Machine
virt-2.12 QEMU 2.12 ARM Virtual Machine
...
$ qemu-system-arm -M vexpress-a9 -m 256M -kernel arch/arm/boot/zImage \
-dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-append "console=ttyAMA0,115200" -nographic
Please append a correct "root=" boot option; here are the available partitions:
1f00 131072 mtdblock0
(driver?)
1f01 32768 mtdblock1
(driver?)
Kernel panic - not syncing: VFS: Unable to mount root fs on unknown-block(0,0)
CPU: 0 PID: 1 Comm: swapper/0 Not tainted 5.16.9 #1
Hardware name: ARM-Versatile ExpressZnowu! Czemu dostajemy kernel panic? Bo nie stworzyliśmy głównego systemu plików i nie można go było zamontować.
Żeby zakończyć QEMU: STRG + a x (najpierw: STRG + a, potem: x)
Potrzebujemy głównego systemu plików!
Krótkie przypomnienie o głównych systemach plików:
Główny system plików to szczyt hierarchicznego drzewa plików. Zawiera pliki i katalogi krytyczne dla działania systemu, między innymi katalog urządzeń i programy startowe. Zawiera też punkty montowania, gdzie inne systemy plików mogą być montowane do hierarchii głównego systemu plików.
— Źródło:https://www.ibm.com/docs/pl/aix/7.1?topic=tree-root-file-system
Główny system plików wymaga struktury katalogów, jak poniżej:
/
├── bin
├── dev
├── etc
├── lib
├── proc
├── sbin
├── sys
├── tmp
├── usr
└── varOprócz struktury katalogów potrzebuje programu init, powłoki, węzłów urządzeń, bibliotek, pseudo systemów plików i kilku podstawowych programów.
Zacznijmy od struktury katalogów.
$ mkdir ~/rootfs && cd $_
$ mkdir bin dev etc home lib proc sbin sys tmp usr var
$ mkdir -p usr/bin usr/lib usr/sbin var/logTeraz potrzebujemy BusyBox. BusyBox dostarcza wszystkich niezbędnych programów do uruchomienia Linuxa. Krótko o BusyBox:
BusyBox to pakiet oprogramowania dostarczający kilka narzędzi uniksowych w jednym pliku wykonywalnym. Działa w różnych środowiskach POSIX jak Linux, Android i FreeBSD, choć wiele dostarczanych narzędzi jest zaprojektowanych do pracy z interfejsami kernela Linuxa. Został stworzony specjalnie dla systemów wbudowanych o bardzo ograniczonych zasobach. Autorzy nazwali go „szwajcarskim scyzorykiem Embedded Linuxa”, bo pojedynczy plik wykonywalny zastępuje podstawowe funkcje ponad 300 popularnych komend.
Zbudujmy BusyBox dla naszego głównego systemu plików.
$ cd ~
$ git clone git://busybox.net/busybox.git
$ cd busybox
$ git checkout tags/1_36_0 -b bb
# Musimy wyeksportować ARCH i CROSS_COMPILE
# (Wyeksportuj zmienne i ścieżkę ponownie po zamknięciu terminala)
# PATH="$PATH:~/x-tools/arm-unknown-linux-gnueabi/bin"
# export ARCH=arm
# export CROSS_COMPILE=arm-unkown-linux-gnueabi-
$ make defconfig
$ make menuconfig
# Settings -> Installation Options -> Destination path for 'make install'
# Wpisz ../rootfs
$ make
$ make install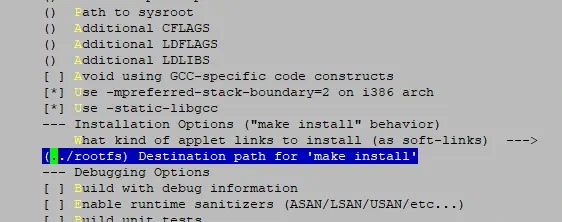
Co to zrobiło? Jak wygląda główny system plików?
$ cd ~/rootfs
$ tree
.
├── bin
│ ├── arch -> busybox
│ ├── ash -> busybox
│ ├── base32 -> busybox
│ ├── base64 -> busybox
│ ├── busybox
│ ├── cat -> busybox
| ...
├── dev
├── etc
├── home
├── lib
├── linuxrc -> bin/busybox
├── proc
├── sbin
│ ├── acpid -> ../bin/busybox
│ ├── adjtimex -> ../bin/busybox
│ ├── arp -> ../bin/busybox
│ ├── blkid -> ../bin/busybox
│ ├── blockdev -> ../bin/busybox
| ...
├── sys
├── tmp
├── usr
│ ├── bin
│ │ ├── [ -> ../../bin/busybox
│ │ ├── [[ -> ../../bin/busybox
│ │ ├── ascii -> ../../bin/busybox
│ │ ├── awk -> ../../bin/busybox
│ │ ├── basename -> ../../bin/busybox
│ │ ├── bc -> ../../bin/busybox
│ │ ├── beep -> ../../bin/busybox
| | ...
│ ├── lib
│ └── sbin
│ ├── addgroup -> ../../bin/busybox
│ ├── add-shell -> ../../bin/busybox
│ ├── adduser -> ../../bin/busybox
│ ├── arping -> ../../bin/busybox
│ ├── brctl -> ../../bin/busybox
│ ├── chat -> ../../bin/busybox
| ...
└── var
└── logTeraz musimy sprawdzić, których bibliotek używa. Inaczej możemy zbudować BusyBox statycznie - wtedy nie musimy się martwić o współdzielone biblioteki, ale zwiększa to rozmiar pliku binarnego.
$ arm-unknown-linux-gnueabi-readelf -a bin/busybox | grep "program interpreter"
[Requesting program interpreter: /lib/ld-linux.so.3]
$ arm-unknown-linux-gnueabi-readelf -a bin/busybox | grep "Shared library"
0x00000001 (NEEDED) Shared library: [libm.so.6]
0x00000001 (NEEDED) Shared library: [libresolv.so.2]
0x00000001 (NEEDED) Shared library: [libc.so.6]Te biblioteki są w sysroot. Sprawdźmy jeszcze, czy są dowiązania symboliczne (w tym przypadku nie ma) i skopiujmy wszystko do rootfs/lib.
$ arm-unknown-linux-gnueabi-gcc -print-sysroot
/home/op/x-tools/arm-unknown-linux-gnueabi/arm-unknown-linux-gnueabi/sysroot
$ export SYSROOT=$(arm-unknown-linux-gnueabi-gcc -print-sysroot)
# Sprawdź dowiązania symboliczne
$ ls -l $SYSROOT/lib
-r-xr-xr-x 1 op op 1232784 Jan 19 17:33 ld-linux.so.3
-r-xr-xr-x 1 op op 12380024 Jan 19 17:33 libc.so.6
-r-xr-xr-x 1 op op 1804408 Jan 19 17:33 libm.so.6
-r-xr-xr-x 1 op op 239892 Jan 19 17:33 libresolv.so.2
...
$ cp $SYSROOT/lib/ld-linux.so.3 lib
$ cp $SYSROOT/lib/libm.so.6 lib
$ cp $SYSROOT/lib/libresolv.so.2 lib
$ cp $SYSROOT/lib/libc.so.6 libTo wszystko, czego potrzebujemy na start. Stwórzmy initramfs - system plików ładowany do RAM. Tworzymy archiwum cpio i kompresujemy gzipem (ostatni krok jest opcjonalny).
$ find . | cpio -H newc -ov --owner root:root > ../initramfs.cpio
$ cd .. && gzip initramfs.cpioUruchommy znowu QEMU! Tym razem przekażemy dodatkowo initrd (wskazujący na główny system plików) i argument rdinit=/bin/sh (uruchamiający interaktywną powłokę).
$ cd linux-5.16.9
$ qemu-system-arm -M vexpress-a9 -m 256M -kernel arch/arm/boot/zImage \
-dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-append "console=ttyAMA0 rdinit=/bin/sh" -nographic \
-initrd ../initramfs.cpio.gzPo udanym starcie naciśnięcie Enter przenosi nas do powłoki.
...
ALSA device list:
#0: ARM AC'97 Interface PL041 rev0 at 0x10004000, irq 32
Freeing unused kernel image (initmem) memory: 1024K
Run /bin/sh as init process
/bin/sh: can\'t access tty; job control turned off
~ # input: ImExPS/2 Generic Explorer Mouse as /devices/platform/bus@40000000/bus@40000000:motherboard-bus@40000000/bus@40000000:motherboard-bus@40000000:iofpga@7,00000000/10007000.kmi/serio1/input/input2
random: fast init done
~ # ls
bin etc lib proc sbin tmp var
dev home linuxrc root sys usrSukces 😎!
Stwórzmy aplikację!
Możemy wymyślić coś takiego, ulepszając program helloworld.
#include <stdio.h>
int main()
{
while(1) {
char name[30];
printf("Enter name: \n");
scanf("%s", name);
printf("Hello %s.\n", name);
}
return 0;
}Skompiluj i przenieś do głównego systemu plików.
$ arm-unknown-linux-gnueabi-gcc helloworld.c -o helloworld
$ file helloworld
helloworld: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV),
dynamically linked, interpreter /lib/ld-linux.so.3, for GNU/Linux 5.16.9,
with debug_info, not stripped
$ mv helloworld rootfs/usr/bin/
$ chmod +x rootfs/usr/bin/helloworld
# Utwórz ponownie archiwum
$ cd rootfs
$ find . | cpio -H newc -ov --owner root:root > ../initramfs.cpio
$ cd .. && gzip initramfs.cpioWarto sprawdzić potrzebne biblioteki. W tym przypadku już je mamy.
$ arm-unknown-linux-gnueabi-readelf -a rootfs/usr/bin/helloworld | grep "program interpreter"
[Requesting program interpreter: /lib/ld-linux.so.3]
$ arm-unknown-linux-gnueabi-readelf -a rootfs/usr/bin/helloworld | grep "Shared library"
0x00000001 (NEEDED) Shared library: [libc.so.6]Super, przetestujmy aplikację!
$ cd linux-5.16.9
$ qemu-system-arm -M vexpress-a9 -m 256M -kernel arch/arm/boot/zImage \
-dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-append "console=ttyAMA0 rdinit=/bin/sh" -nographic \
-initrd ../initramfs.cpio.gz
...
~ # helloworld
Enter name:
World
Hello World.
Enter name:Działa! Ale szkoda, że musimy ręcznie uruchamiać program. To w końcu urządzenie wbudowane 😉. Przekazanie helloworld do rdinit rozwiąże problem.
$ qemu-system-arm -M vexpress-a9 -m 256M -kernel arch/arm/boot/zImage \
-dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb \
-append "console=ttyAMA0 rdinit=/usr/bin/helloworld" -nographic \
-initrd ../initramfs.cpio.gz
...
Freeing unused kernel image (initmem) memory: 1024K
Run /usr/bin/helloworld as init process
Enter name:
World
Hello World.
...Wciąż tu jesteś? Świetnie!
Podsumowanie
W tym artykule stworzyliśmy cross-toolchain dla procesora ARM, skompilowaliśmy kernel Linuxa dla płytki Arm Versatile Express i skonfigurowaliśmy QEMU do uruchomienia kernela i emulacji płytki. Potem stworzyliśmy główny system plików i wypełniliśmy go naszą aplikacją.
Stworzyliśmy więc system embedded Linux od zera! 😎
Zazwyczaj to podejście nie jest odpowiednie - zaleca się używanie systemów budowania jak Yocto czy Buildroot. Ale to świetna zabawa i dobra wiedza do lepszego zrozumienia, jak rozwijać systemy embedded Linux.
Mam nadzieję, że się podobało. Dzięki za przeczytanie!

Powiązane wpisy
Buildroot i STM32MP257F-DK
Jak zbudować i wgrać obraz na płytkę STM32MP257F-DK przy użyciu Buildroot oraz analiza struktury wygenerowanego obrazu
TFTP i NFS w rozwoju Embedded Linux
Wykorzystaj TFTP i NFS, by przyspieszyć uruchamianie Embedded Linux
Komentarze